


복잡한 계산 없이도 의료용 마이크로로봇을 인체 내에서 정밀하게 제어할 수 있는 새로운 구동 방법이 개발됐다.
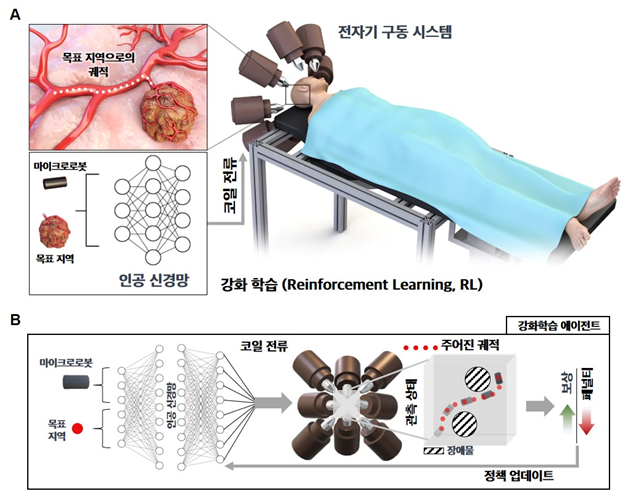
한국연구재단은 최홍수 교수(대구경북과학기술원) 연구팀이 강화학습(Reinforcement Learning)을 기반으로 한 인공신경망(Artificial Neural Network)을 활용해 자성 마이크로로봇의 3차원 위치를 자동으로 정밀 제어할 수 있는 방법을 개발했다고 밝혔다.
외부 전자기 구동시스템(Electromagnetic Actuation Systems)에서 생성되는 자기장과 자기력에 의해 무선 제어되는 자성 마이크로로봇은 이 특성을 이용, 인체 내 치료 인자를 전달하는 정밀 표적 치료에 활용될 수 있다.
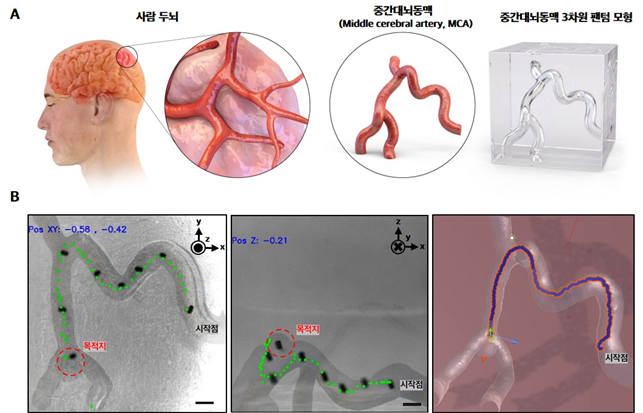
그러나 혈관, 종양 등과 같은 인체 내 동적인 환경에서 마이크로로봇을 목표 위치까지 구동시키기 위해서는 복잡한 모델링 또는 수학적 계산이 필요한데, 활용 목적에 따라 다양한 형상을 갖는 마이크로로봇 특성상 개별 로봇에 맞는 적절한 구동 체계를 각각 수립해야 해 많은 시간과 노력이 소모된다는 한계가 있었다.
이에 연구팀은 복잡한 수학적/물리적 모델링 없이도 다양한 형태의 마이크로로봇을 제어할 수 있는 범용적인 방법을 고안, 마이크로로봇의 3차원 정밀 위치 제어법을 스스로 터득할 수 있는 강화학습 기반의 인공신경망을 개발했다. 개발된 인공신경망은 전자기 구동시스템에 전류를 직접 인가하는 방식으로 마이크로로봇을 구동, 그 결과를 직접 평가함으로써 마이크로로봇의 3차원 위치 제어법을 스스로 학습했다. 학습된 인공신경망을 활용한 결과, 마이크로로봇이 종래의 제어 방식을 사용한 경우보다 약 50% 빠른 속도로 목표 위치에 수렴했다. 또한, 기존의 제어 방식보다 약 40% 더 적은 위치 오차를 보였다.
최홍수 교수는 “이번 연구를 통해 강화학습 기반의 인공신경망을 활용한 구동 방법이 종래의 제어 방식보다 마이크로로봇을 더 빠르고 정밀하게 제어할 수 있다는 것을 확인할 수 있었다”며, “적은 시간과 자원으로 다양한 형태의 마이크로로봇과 전자기 구동시스템에 적용될 수 있는 범용적인 구동 체계가 될 것으로 기대된다”고 밝혔다.
이번 연구 성과는 인공지능 분야 국제학술지 ‘네이처 머신 인텔리전스(Nature Machine Intelligence)’에 1월 11일 게재됐다.
논문명은 Autonomous 3D positional control of magnetic microrobot using reinforcement learning 이다.
이 기사 좋아요 1
<저작권자 ⓒ 특허뉴스 무단전재 및 재배포 금지>

댓글
의료용마이크로로봇 관련기사목록
|
많이 본 기사
|



















특허뉴스 소개 ㅣ 특허뉴스 조직도 ㅣ 개인정보취급방침 ㅣ 저작권보호 규약 ㅣ 이메일무단수집거부 ㅣ 광고안내 ㅣ 기사제보
한국특허신문사ㅣ제호: 특허뉴스 (月刊)ㅣ정기간행물 등록번호:서울중 라00159ㅣ등록일: 2005년 4월6일
인터넷신문ㅣ제호: 특허TVㅣ등록번호:서울,아03336ㅣ등록·발행일: 2014년9월25일
발행소: 우(04558) 서울특별시 중구 퇴계로 217(충무로4가)ㅣ대표전화:02-2238-4345ㅣ팩스:02-2238-6769
발행/편집인: 이성용ㅣ청소년보호책임자: 이성용ㅣ뉴스제보: patentnews@naver.com
특허뉴스의 모든 컨텐츠(기사)는 저작권법의 보호를 받습니다. 무단 전재·복사·배포 등을 금지합니다.
Copyright ⓒ 2005 특허뉴스. All rights reserved.
